
- 0
- 0
- 0
分享
- 张亚勤:无人驾驶未来需要把握的八大确定性原则
-
2022-08-16

当前汽车产业正在进行“新四化”即网联化,智能化,共享化和电动化上的升级,而无人驾驶在过去的五年内,无论在投资界、产业界和科研界上,都是一个十分活跃的话题。那么未来,无人驾驶将怎样全面赋能智慧交通行业呢?无人驾驶是否会打破当前的商业格局?无人驾驶究竟将走向何方?
在2022北京智源大会的人工智能新基建论坛上,清华大学智能科学讲席教授、智能产业研究院(AIR)院长,中国工程院院士、人工智能国际治理研究院学术委员张亚勤带来了题为「智能走向无人驾驶」的主题演讲。张院士首先从智慧交通新时代的背景出发,指出无人驾驶将作为关键性的一环全面赋能交通产业;然后分别从无人驾驶的技术可行性,无人驾驶路线图,产业生态等三个方面进行了详细的阐述;最后总结出了无人驾驶未来需要把握的八个确定性原则。

#01
无人驾驶:智慧交通新时代中的关键一环
从人工智能软件角度来看,无人驾驶是未来人工智能5-10年中一个最具挑战性的有边界的AI垂直领域问题。一方面,无人驾驶一直是人类长期的梦想,它涉及到整个智慧交通、智慧城市等各个方面,是人工智能基础设施重要的一部分。另一方面,它作为人工智能新技术,在当前汽车产业升级的背景下,它可以提高驾驶安全,提升交通效率。与此同时,无人驾驶领域所积累的软件、芯片、算法等关键技术要素在实际应用场景中也可以创造出巨大的商业价值。在未来5年后,由传统汽车供应商为主导的产业模式将面临更多元化的竞争,无人驾驶有望打破现有汽车产业的商业格局。
#02
无人驾驶关键技术与前沿算法

无人驾驶当前也面临着软件、算法、理论、产业政策以及系统方面的挑战。其中主要可划分为两大方面的影响因素:市场和非市场。非市场方面主要包括伦理、隐私、法律法规以及其他产业政策因素等等。而在市场方面则主要包括:技术可行性,用户需求,产业生态和商业模式。下面主要从技术可行性方面对无人驾驶关键技术和算法进行总结:
无人驾驶的关键技术主要体现在五个层次:原始数据层、定位感知层、认知理解层、决策规划层,控制抽象层。首先就是针对数据感知构建一个环境模型,然后利用该模型去做决策和规划,同时将决策数据分别输送到控制层,仿真平台,数据平台以及车辆平台,最后在每个层次里面形成闭环。在无人驾驶中,几乎涵盖了所有从过去的算法到现在的深度学习算法,包括:点云数据压缩、目标检测、场景补全、仿真模拟生成极端场景、SLAM定位、全景分割、多模态信息融合和模型压缩等等。

#03
提高模型的可泛化性和安全冗余性
尽管无人驾驶已经涉及了大量前沿的AI算法,但由于现实场景复杂,总存在一系列的Corner Case。而一旦出现Corner Case将会导致事故的发生。因此,当前的深度学习模型必须具备一定的模型泛化性,即:根据已有数据训练之后,在遇到新的场景时有模型泛化能力。因此,无人驾驶技术中关键的一点,也是比较困难的一点就在于如何提高模型感知的鲁棒性和可泛化性。


一方面,在感知的过程中,通常会使用激光雷达、摄像头,毫米波雷达等等来实现机器对现实场景数据的感知,而这三种设备面对不同的环境都有各自的优势和性能上的差异。
另一方面,无人驾驶要成功,要商业化,一定是规模化,一定要比人类驾驶安全性提高一个数量级,那么就要求机器获取的数据信息应当比人类更丰富,能够处理和应对更多不同维度上的应用场景。因此,在感知系统中,不仅需要利用各类前沿的AI算法,同时还需要结合多传感器的互补性,其中包括激光雷达的精密性,摄像头丰富的色彩和语义信息,毫米波雷达的距离信息等优势,从而提高整体系统的可泛化性和安全冗余性。
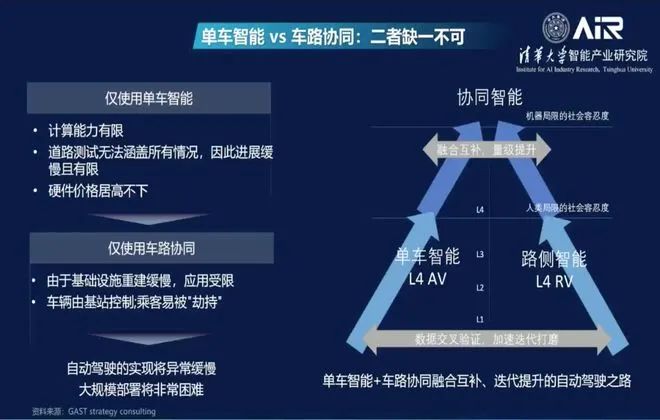
此外,在现有自动驾驶系统中,单车智能主要存在以下三个挑战:缺乏全局视角;极端情况感应能力有限(距离、尺寸、计算能力等等);只能感知当前情况,无法推断和预测之后的道路情况。而车路协同则可以完美解决单车智能存在的问题。
从感知方面,车路协同可以获取到全局交通信息,感知范围更全面,同时能够及时探测道路障碍和突然的变化。从决策方面,车路协同可以推断并预测出未来的情况。因此,单车智能与车路协同缺一不可。又由于我国已经在车路协同方面走在了全球前列,所以,在自动驾驶路线选择上,应当坚持发挥中国优势,走一条单车智能与车路协同融合互补、迭代提升的自动驾驶之路。
#04
产业生态和政策

在产业生态和政策方面,当前全球政府都在积极部署V2X,而中国在政策的制定和实验平台的搭建部署方面则走在了全球前列。由清华和百度联合发起的Apollo Air行动计划也取得了一系列研究成果,其中主要包括:发布《面向自动驾驶的车路协同技术与展望》白皮书,建立第一个车路协同数据集DAIR-V2X,发布了全球首个开源开放的智能网联路侧单元操作系统“智路OS”等等。

#05
总结及展望:无人驾驶八大确定性原则
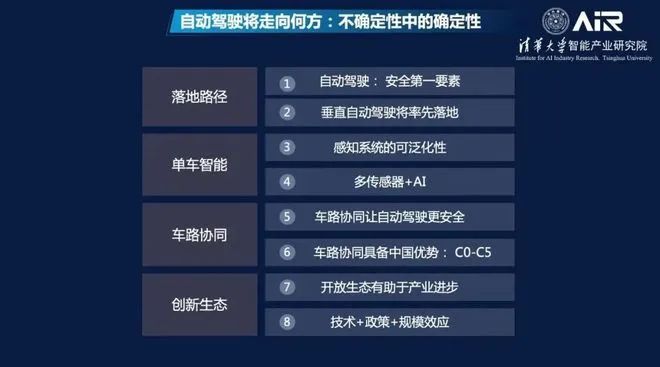
最后,面对无人驾驶究竟将走向何方的问题,张亚勤院士指出需要把握以下八点不确定性中的确定性:
坚持驾驶安全作为第一要素
率先在各大垂直领域落地自动驾驶技术
提高感知系统的泛化性和鲁棒性
传感器与AI感知系统互补
坚持车路协同,发挥中国优势
车路协同让自动驾驶更安全
开放生态促进产业进步
注重技术结合政策,同时强调规模效应
无人驾驶是人类长期以来的梦想,我们必须敢做梦,才能做成梦。
关于我们
清华大学人工智能国际治理研究院(Institute for AI International Governance, Tsinghua University,THU I-AIIG)是2020年4月由清华大学成立的校级科研机构。依托清华大学在人工智能与国际治理方面的已有积累和跨学科优势,研究院面向人工智能国际治理重大理论问题及政策需求开展研究,致力于提升清华在该领域的全球学术影响力和政策引领作用,为中国积极参与人工智能国际治理提供智力支撑。
新浪微博:@清华大学人工智能国际治理研究院
微信视频号:THU-AIIG
Bilibili:清华大学AIIG
来源 | 本文转载自网易新闻,
-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号清华大学人工智能国际治理研究院 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
-

-
北京
甲方 · 公立学校
未认证的机构号
最近发布
-
2023-05-24
-
2023-05-18











